
いて座M8,M20・ローカルコントラストとコンポジット処理の順番
前回の記事の最終画像です。
ナローバンドではこれまでで一番ノイズ感の少ない仕上がりになりました。

実はこの画像は、ダークもフラットも入れていません。
元raw画像をPhotoshopで読み込み、Topaz adjustで
ローカルコントラスト(HDR)をかけてTIFF出力したものを
DSSでコンポジットしました。
ダークノイズ低減はPSのcamera-raw現像頼み、周辺減光も
同じくcamera-rawの周辺減光補正です。
ローカルコントラスト処理の場合、周辺減光や傾斜かぶりのような、
大域的なレベル差を強調することなく、星雲のディテールを強調する
ことができ、光害ムラなどに神経質にならなくてもそこそこ仕上がる
メリットがあります。
その代わり・・・センサーのゴミは取れません(涙
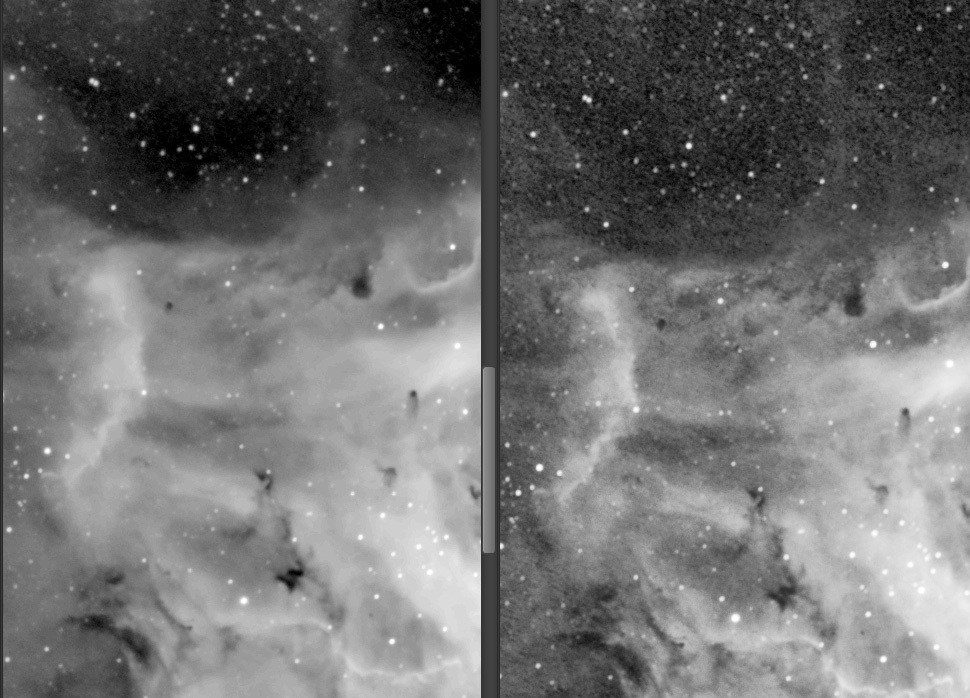
今回驚いたのは、ローカルコントラスト処理後にコンポジットした方が、
はるかに暗部のノイズが少ないことでした。
一つの仮説は、「ノイズレベルの高い状態でのローカルコントラスト処理では、
ノイズレベルが高いゆえ、ソフトウェア的なノイズ除去がより効果的に効く」
のではないか、というものです。
コンポジットでノイズが少なくなってしまってからでは、ソフトウェアは
逆にノイズと判断できなくなり、そのまま残ってしまうのではないか、
という訳です。
正しいのかどうか・・・そもそも右側の処理には何か別の問題があるのか・・
謎は深まるばかりです。
もしこの仮説が正しいのであれば、考えられる最強の処理フローは次のような
ものになります。
(今回の処理では2)を省略しているということになります)
1)撮像
2)DNG変換してRAP2でダーク減算、フラット補正
3)1枚ぬきだしてPSでcamera raw現像、
アクションの記録をONにして16ビットモード化、HDR処理、TIFF保存
4)記録したアクションを使用してRAW画像をバッチ処理現像
5)出力されたTIFFファイルをDSSでスタック
6)スタックした画像をPSで最終調整
というわけで、RAP2を導入してみようと思います。
追記2015/5/12
RAP2を導入したのですが、残念ながらα7sのrawには未対応でした。
気長に対応される日を待ちたいと思います。
関連記事
Follow me!
コメントを残す